Composants
Introduction
Maintenant que l'on a vu la fonction principale de la pince BART nous devons expliquer le fonctionnement des différents composants que nous allons utilisé ainsi que des notions qu'il faut connaitre pour la réalisation d'un projet en robotique.
Nous expliquerons dans une première partie tout ce qui se rapporte au robot programmable sur lequel nous avons décidé de créer notre pince. Dans le deuxième partie nous ferons une mise au point du cahier des charges avant le développement de notre prototype.
Robot programmable
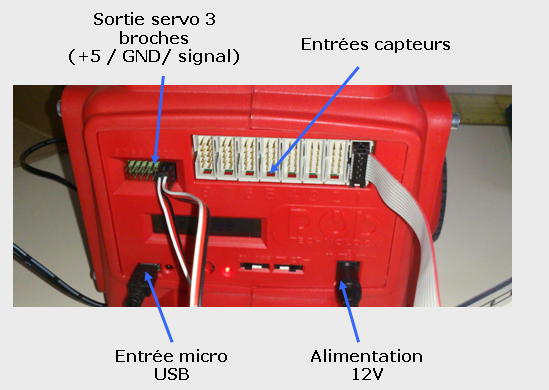
Nous avons choisi, pour la réalisation de notre maquette, un robot programmable qui sert de base de construstion : Le robot POB.

Nous avons répéré sur l'image ci-dessus les différents composants du robot POB.
Pour notre TPE les motoréducteurs du robot ne nous seront d'aucune utilité, nous n'en expliquerons pas le fonctionnement.
Nous allons expliquer dans cette partie le rôle et le fonctionnement du microcontroleur, l'élément principal de la carte électronique. Ensuite nous expliquerons les différences entre les entrées analogiques et les sorties numériques. Nous avons aussi dû lire la notice d'utilisation du robot POB pour avoir des informations sur l'alimentation du robot ainsi que le courant qu'il peut founir : nous vous expliquons cela dans la partie Tension et Courant. Après avoir parlé des différentes méthodes d'alimentation du robot, c'est tout naturellement que nous présenterons la batterie du robot.
Ensuite nous parlerons d'éléments que nous avons choisis d'utilisé : logiciel de programmation, servomoteurs et pièces mécaniques.
Microcontroleur
Le microcontrolleur est l'élément le plus important du robot POB. En effet, c'est grâce à lui que l'on peut contrôler nos servomoteurs en fonction de la distance, l'avancement du robot, etc.
Nous avons décidé de regarder la fonction de chacun des composants du microcontroleur pour mener à bien notre maquette final. Cependant une explication poussé des différents serait bien trop longue et pas important dans le cadre de notre TPE.
Un microcontrolleur est un rassemblement, dans le même boitier, de différents composants. Voici les composants essentiels que l'on retrouve dans tous les microcontrolleurs :
- Un processeur
- Différents types de mémoires
- Les entrées sorties
Bien sûre il existe bien d'autre composants dans un microcontrolleur (composants qui peuvent varier d'un modèle à l'autre).
Ces composants doivent pouvoir communiquer entre eux pour échanger des informations. On appelle ces lignes de communication bus, ils sont au nombre de 3 :
- Bus de contrôle
- Bus de données
- Bus d'adresse
Le rôles et le fonctionnement de bus n'est pas important dans le cadre de notre TPE puisqu'ils ne sont pas un critère de choix pour choisir son microcontrolleur. Pour faire simple, il faut juste savoir que toutes les informations qui transitent de composants en composants sont transportées grâce à des bus.
Nous allons maintenant voir à quoi servent les différents composants du microcontrolleur.
Le processeur
Le processeur est l'élément le plus important du microcontrolleur. C'est lui qui éxecute le programme qui se situe dans la mémoire du microcontroleur.
Le processeur est lui même divisible en 3 grandes parties :
- Une unité arithmétique et logique
- Une unité de commande
- Des registres CPU
L'UAL (unité arithmétique et logique) s'occupe des calculs de base (addiction, soustraction, etc.) et des tests logique (AND, NOT,OR etc.).
L'unité de commande traduit et éxécute le programme (situé dans la mémoire). Elle doit donc obligatoirement communiquer donc avec l'UAL et avec la mémoire.
Les registres sont des toutes petites mémoires appartenant au processeur. Elles sont très rapide pour permettent au processeur d'exécuter son programme très rapidement.
Pour finir, le processeur à besoin d'une horloge pour avoir un rytme à auquel il execute les instructions. Cette horloge délivre des impulsions à une certaine fréquence, plus celle ci est élévé, plus le processeur pourra aller vite.
Les memoires
Le processeur possède différents types de memoires, nous nous interesserons aux deux memoire les plus connus et utiles :
- Memoire ROM
- Memoire RAM
La memoire ROM ( Read Only Memory) contient le programme à exuter par le processeur. Une fois télécharger le processeur peut uniquement lire le contenu de la mémoire, il ne peut pas le modifier ou le supprimer!
La memoire RAM (Random Access Memory) est une mémoire temporaire et volatile, lorsque le microcontroleur n'est plus alimenté le contenu de la mémoire RAM disparait. Le processeur peut lire et écrire dans cette mémoire, c'est d'ailleurs dans celle-ci que le processeur stock les variables qu'il aura besoin pour exécuter le programme.
Les entrées / sorties
Grâce à ces entrées sorties le microcontrolleur peut communiquer avec "le monde extérieur". En plus des broches d'alimentation du microcontroleur il y a différents ports pour que le microcontroleur puisse, par exemple, communiquer avec un ordinateur, recevoir des informations d'un capteur, commander une led (via un programme),...etc.
- Port en entrée : pour recevoir des informations (d'un capteur de distance par exemple)
- Port en sortie : pour emettre des informations (allumer une LED par exemple)
- Port bi-directionnel : pour recevoir et emettre des informations
On peut, dans certain cas, definir grâce à un programme si on utilise le port en entrée ou en sortie.
Pour résumer la structure d'un microcontroleur minimal pourrait être representé comme ceux- ci :

Le processeur peut uniquement lire le programme dans la mémoire, puis il peut lire et écrire dans une autre mémoire pour stocké les variables utiles au bon déroulement du programme. Le processeur est cadencé grâce à une horloge et peut communiqué avec des éléments extérieurs grâce aux ports d'entrés / sorties.
Analogique ou numériques ?
Sur le robot POB il y a deux types de connecteurs : les connecteurs analogiques et numériques.
Sur les connecteurs analogiques la grandeur du signal peut prendre une infinité de valeur, l'information réçu est donc continue. Un capteur de distance renvoie par exemple une tension.
Sur les connecteurs numériques les valeurs sont limité et on distingue deux types :
- Tout ou rien : peut prendre deux état, par exemple pour une led, soit elle est éteinte, soit allumée
- Numérique : c'est soit une grandeur analogique numérisé soit une valeur tout ou rien. Toujours avec l'exemple du capteur de distance, la valeur analogique récupéré doit être numériser pour être compris par le microcrontroleur (qui lui est codé sur un nombre de bits limité : 8bits, 16bits, 32bits, etc)
Tension et courant
Le robot POB peut être alimenté de deux manières différentes:
-
Par une alimentation secteur via un cordon: le robot est alimenté en 12 volts. Cela est pratique seulement devant l'ordinateur pour éviter de recharger la batterie a répétition.
Sur secteur, le robot est capable de fournir 1.5A au total.- les moteurs sont donc couper car le fil l'empeche de se deplacer librement: moteur CC, aucune consommation car coupés.
- Pour les servomoteurs ( 8 maximum ): 100mA par servomoteur.
- Pour les connecteurs capteurs, cela dépend de la tension d'alimentation:
- Pour 7.2V: 50mA par connecteur
- Pour5V: 25mA par connecteur
- Pour3.3V: 10mA par connecteur
- Par sa batterie ( expliquée juste en dessous ): elle est plutôt reservée pour le fonctionnement du robot pour la validation des projets, car il faut demonter une plaque sous le robot a chaque fois pour demonter la batterie / La recharger.
Sur Batterie, le robot est capable de fournir 3A au total.- Pour les moteurs CC: 800mA
- Pour les servomoteurs ( 8 maximum ): 200mA par servomoteur.
- Pour les connecteurs capteurs, cela dépend la aussi de la tension d'alimentation:
- Pour 7.2V: 50mA par connecteur
- Pour 5V: 25mA par connecteur
- Pour 3.3V: 10mA par connecteur
Pour choisr son moyen d'alimentation, il suffit de basculer un interrupteur sur batterie ou secteur.
Batterie
Le robot POB contient un accumulateur NiMH (nickel-hydrure métallique) de 7.2 V avec une capacité de 3000mAh.

On peut donc en deduire quelle quantité d'énergie est disponible dans la batterie en joules:
E=7.2 x 3 V.ah
E=22 W/h Or nous savons que un W/h correspond a 3600 joules.
E=22 x 3600
E=79200 joules disponibles dans la batterie.
Logiciel de programmation
Pour la programmation de notre robot, il existent deux logiciels crées par le fabricant du robot:
- Orbee: c'est un logiciel éducatif qui permet de programmer avec un organigramme, c'est à dire sans connaissances de programmation requise.
 Le logiciel est facilement comprehensible et à la portée de tous, mais il reste tout de meme trop limité, plusieurs fonctions ne sont pas possible avec ce type de logiciel, comme recupérer l'état du bouton (qui sert normalement au lancement du programme), ou encore écrire un message sur l'écran.
Le logiciel est facilement comprehensible et à la portée de tous, mais il reste tout de meme trop limité, plusieurs fonctions ne sont pas possible avec ce type de logiciel, comme recupérer l'état du bouton (qui sert normalement au lancement du programme), ou encore écrire un message sur l'écran.
Il existe du coup un autre logiciel qui permet de programmer cette fois "comme un grand" et donc de combler le manque de fonction du logiciel Orbee: POB-tools! - POB-tools: c'est un logiciel qui permet de compiler sur le robot un "vrai" programme avec des fonctions diverses et variées. Il est possible d'écrire le programme en C ou en basic (le C et le BASIC sont deux languages de programation). Nous allons programmer notre robot en Basic.
Servomoteurs
Un servomoteur est un système motorisé comparable à un petit moteur, les deux plus grands type sont:
- Les servomoteur simple (rotation sur 180°), il est capable d'atteindre la position demandée entre 0 et 180° puis de la maintenir jusqu'à nouvel ordre.
- Les servomoteurs à rotation continue (nombre de tours infini) il tourne selon un sens et une vitesse demandée puis sont capable de la maintenir constante.

Le mouvement du servomoteur est genéré par un moteur courant continu. Le système électronique compare le signal consigné à celui du potentiomètre, si il y a une difference, le moteur est commandé dans la direction qui garantit le plus court chemin pour arriver à la valeur de la consigne.
Pour la realisation de notre maquette, nous avons eu besoin de servomoteurs simple. On leurs donne donc comme consignes des positions angulaire différentes.
Le modèle de servomoteur que nous avons utilisé sont des futaba S3003:
 Voici quelques caractéristiques des servomoteurs que nous utilisons:
Voici quelques caractéristiques des servomoteurs que nous utilisons:
- Couple: 4.1 kg.cm
- Course de 180°
Mécanique
Lors de la création de notre Pince BART, plusieurs composants mécaniques étaient nécessaire afin de réalisé les fonctions désirées. Nous allons listé les principaux:
- Crémaillère + Pignon:
Cela permet donc de tranformer un mouvement de rotation en mouvement de translation. Cela nous a donc permis de faire translater la PINCE à partir du mouvement de rotation du servomoteur. Nous voyons bien que lorsque le pignon tourne, la cremaillère se deplace dans un mouvement de translation.
Nous voyons bien que lorsque le pignon tourne, la cremaillère se deplace dans un mouvement de translation. - Un pignon + 2 servolinks (qui ont un pignon chacun):
Nous nous sommes inspiré pour notre montage du leve palette (un montage deja immaginé par la societé POB) pour realiser le mouvement d'élevation de la pince avec l'objet sans trop de complications.
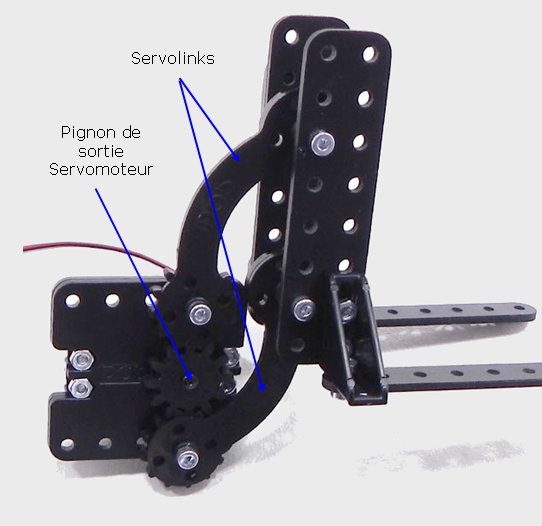 Grâce au schéma, nous voyons que lorsque le pignon du servomoteur tourne, cela leve le système au bout verticalement: c'est un paralélogramme qui varie.
Grâce au schéma, nous voyons que lorsque le pignon du servomoteur tourne, cela leve le système au bout verticalement: c'est un paralélogramme qui varie.
Nous avons modifié ce système pour adapter au lieu d'un lève palette, notre pince.
Au lycée, nous n'avions pas les deux servolinks néccessaires, nous avons donc demandé à notre professeur si l'on pouvait les crées avec l'imprimante 3D. Nous en avons donc crée deux a partir du fichier solidworks (modélisation 3D) que nous avons epaissi de 2mm afin d'augmenter leur rigidité. L'imprimante OBJET 24 du lycée c'est donc occuper de la realisation. - Deux plaques perforées:
Pour crées les machoires de la pince, nous avons simplement utilisé les plaquettes perforées fournis avec le robot, l'une est fixe, l'autre est mobile pour fermer la pince.

Digramme FAST
Voici le diagramme fast de notre prototype, il nous permet de prévoir quel composant va réaliser la fonction nécéssaire. dans le diagramme, les choses d'ordre similaire sont classées dans la même colonne.
A gauche, c'est la fonction principale du systeme, la fonction est decomposée de plus en plus vers la droite, pour arrivé à la fin au composant qui repond a cette fonction.
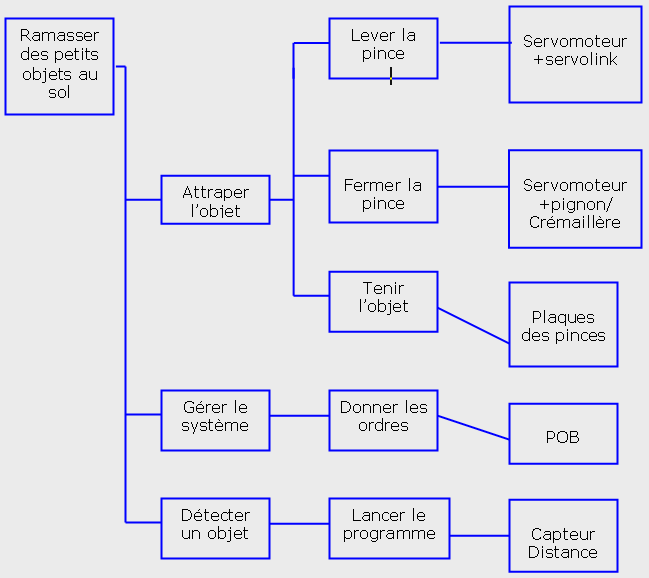
Le diagramme peut devenir très long pour les systèmes complexes.Ici notre robot reste assez simple, les composants sont limités, le schema reste donc assez simple et explicite.
Chaine d’énergie
La chaine d'énergie est fréquement utilisé pour decomposer le trajet de l'énergie et ses differentes transformations.
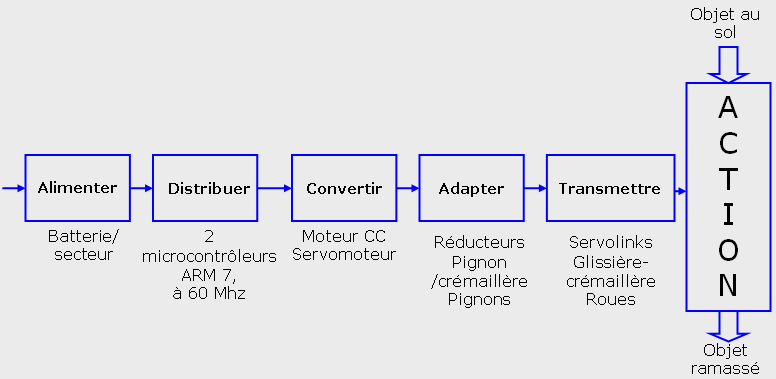
Nous voyons que sur le robot, l'énergie d'entrée est forcement de l'énergie électrique, et ressort toujours sous forme d'énergie mécanique.